Initial settings
When the SkyRoof program starts for the first time, you will be offered an option to select the motor type
that your roll-off roof is using. Click on the appropriate selection and click 'OK' to continue.
(You can change the setting later on, if needed)
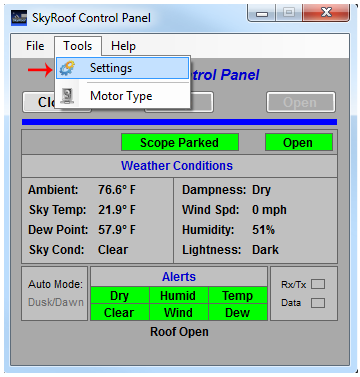
Note: to change the motor setting at a later date, select 'Motor Type' from the 'Tools' drop down menu.
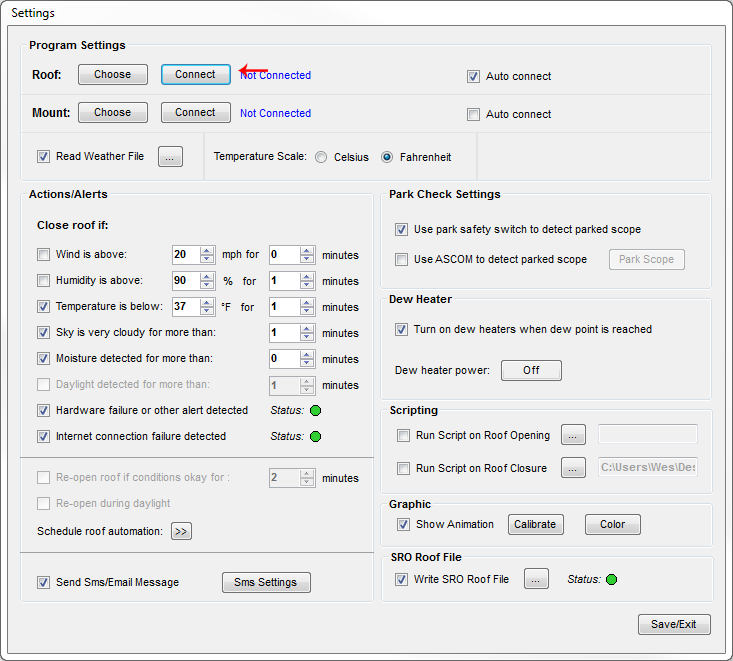
Click on the “Tools” drop down menu and select “Settings”. This will open the Settings page.
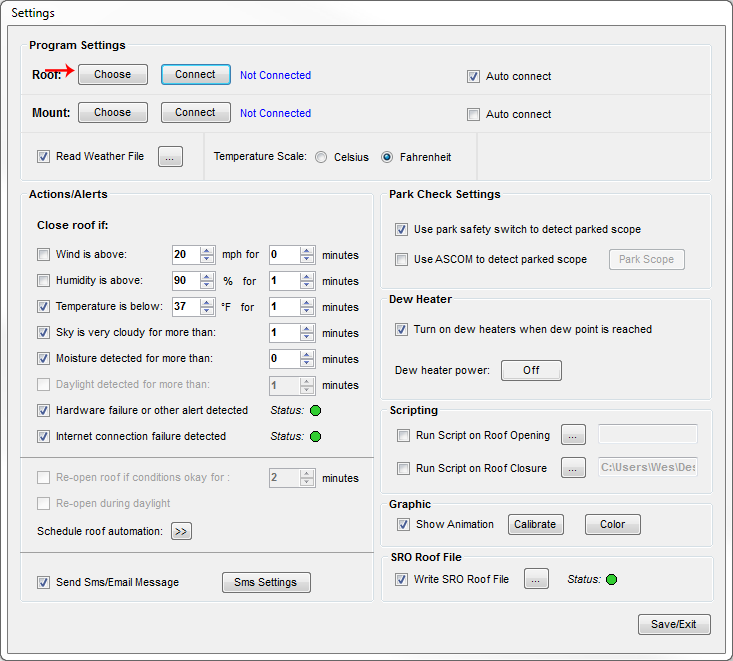
For proper operation, the SkyRoof control program needs to be connected to an ASCOM driver. Click on the Roof: “Choose”
button to continue. An ASCOM “Chooser” dialog will be displayed.
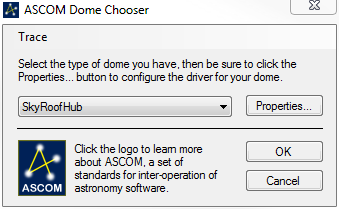
When the ASCOM Chooser dialog appears, select the SkyRoof or SkyRoofHub entry from the drop down selections.
Click on the "Properties" button to continue.
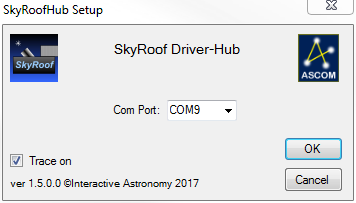
In the next dialog, you will need to point the driver to the appropriate Com port.
Select the Com port from the entries in the drop down list.
If you are not sure which Com port the SkyRoof board is assigned to, open the Windows Control Panel, select Device Manager>Ports.
Look for a port entry named 'Arduino Uno'. The adjacent (COMXX) is the com port number. After you have selected the Com port,
click OK to continue.
To complete the connection to the driver, click the “Connect” button on the Settings page as shown.
The SkyRoof driver and program are now connected to the roof control board.
If you (optionally) choose to connect your telescope mount to the SkyRoof program, use the same steps as above.
Note: Ticking the “Auto connect at launch” check box will automatically connect the driver(s) when SkyRoof is launched.
Do not check these boxes until you have successfully connected to the driver(s) at least once.
Continue to the next Help section titled 'Roof calibration' before operating the roof first time.
Created with the Personal Edition of HelpNDoc: Effortlessly upgrade your WinHelp HLP help files to CHM with HelpNDoc